



















Робот калмар с джет подводно придвижване
Инженерите от Калифорнийския университет в Сан Диего са построили робот, подобен на калмар, който може да плува автономно, задвижвайки се, генерирайки струи вода. Роботът носи собствен източник на енергия в тялото си. Той може да носи и сензор, като камера, за подводно изследване.
Изследователите подробно описват работата си в скорошен брой на Bioinspiration and Biomimetics.
„По същество ние пресъздадохме всички ключови характеристики, които калмарите използват за високоскоростно плуване“, каза Майкъл Т. Толи, професор в катедрата по машинно и аерокосмическо инженерство в Университета на Сан Диего. „Това е първият автономен робот, който може да генерира реактивни импулси за бързо придвижване като калмарите и може да постигне тези струйни импулси, като променя формата на тялото си, което подобрява ефективността на плуването.“
Този робот калмар е направен предимно от меки материали като акрилен полимер, с няколко твърди, 3D отпечатани и лазерно изрязани части. Използването на меки роботи при подводно изследване е важно за защита на рибите и коралите, които могат да бъдат повредени от твърди роботи. Но меките роботи са склонни да се движат бавно и изпитват трудности при маневриране.
Изследователският екип, който включва роботизирани специалисти и експерти по компютърни симулации, както и експериментална динамика на флуидите, се обърна към главоногите като добър модел за решаване на някои от тези проблеми. Калмарите например могат да достигнат най-бързите скорости от всички водни безгръбначни, благодарение на реактивен задвижващ механизъм.
Техният робот поема обем вода в тялото си, като същевременно съхранява еластична енергия в кожата и гъвкавите ребра. След това освобождава тази енергия чрез компресиране на тялото си и генерира струя вода, която да се задвижва.
В покой роботът калмар е оформен приблизително като хартиен фенер и има гъвкави ребра, които действат като пружини по страните му. Ребрата са свързани с две кръгли пластини във всеки край на робота. Единият от тях е свързан с дюза, която едновременно поема вода и я изхвърля, когато тялото на робота се свие.
Както при всеки подводен робот, хидроизолацията беше основна грижа за електрическите компоненти като батерията и камерата. Те ускориха скоростта на робота на около 18 до 32 сантиметра в секунда (около половин миля в час), което е по-бързо от повечето други меки роботи.
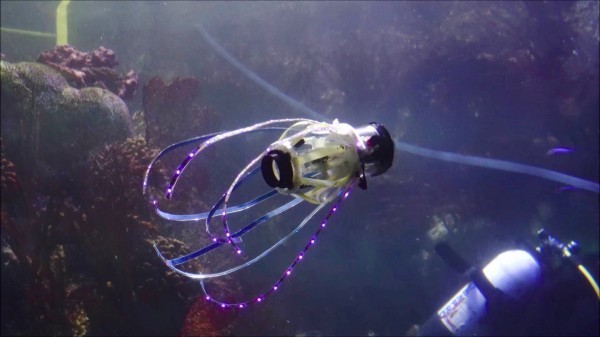
„След като успяхме да оптимизираме дизайна на робота, така че той да плува в резервоар в лабораторията, беше особено вълнуващо да видим, че роботът успя успешно да плува в голям аквариум сред корали и риби, демонстрирайки неговата осъществимост за реални приложения „, каза Калеб Кристиансън, който ръководи изследването като част от докторската си степен.